

Moderne Fahrzeuge sind zunehmend komplexe mechatronische Systeme, die mit dem Fahrer und der Umwelt interagieren, wobei es die erforderlichen Produkteigenschaften und Funktionalitäten umfassend zu spezifizieren und zu überprüfen gilt. Die intra- sowie intersystemischen Wechselwirkungen im Fahrzeug müssen dabei genauso wie die zu Fahrer und Umwelt berücksichtigt werden. Hierbei unterstützt die Validierungsumgebung „X-in-the-Loop“.
Die Autoren: Prof. Dr. Dr. Albert Albers, Institutsleitung IPEK Institut für Produktentwicklung und stv. wissenschaftlicher Sprecher Zentrum Mobilitätsysteme am KIT Karlsruhe Institut für Technologie; Sascha Ott, Forschungsabteilungsleiter Antriebssystemtechnik am IPEK und Geschäftsführer Zentrum Mobilitätsysteme am KIT; Dr. Matthias Behrendt, Forschungsgruppen- leiter NVH/Driveability und stv. Forschungsabteilungsleiter Antriebssystemtechnik am IPEK
Entwicklungsziele wie energieeffizientes Fahren, kundenorientiertes NVH-Verhalten (Noise, Vibration, Harshness) und Sicherheit müssen neben CO2-Reduzierung, Kosten und Zuverlässigkeit durchgängig und eng vernetzt betrachtet werden. Durch Berücksichtigung all dieser Aspekte entstehen häufig Zielkonflikte, weshalb es nicht zielführend ist, einzelne Aspekte losgelöst zu optimieren. Da letztendlich immer der Kunde entscheidet, ob ein Produkt erfolgreich am Markt bestehen kann, ist eine der langfristig wichtigsten Aufgaben weiterhin die Abstimmung des Fahrzeugverhaltens im Sinne der Kundenzufriedenheit und des Komforts.
Dabei spielen das akustische und schwingungstechnische Verhalten von Fahrzeugen und deren Antriebskomponenten eine entscheidende Rolle. Die Entwicklung von Fahrzeugen mit neuen Antriebskonzepten erfordert dabei neue Methoden und Prozesse auf der Basis von domänenübergreifendem Gesamtsystemverständnis sowie integrierten Entwicklungsumgebungen, die eine durchgängige Verwendung von virtuellen und realen Prototypen im gesamten Entwicklungsprozess gewährleisten.
Als globales und visionäres Ziel gilt es eine durchgängige Entwicklungsumgebung unter Einbeziehung von Forschung und Industrie zu realisieren, bei der gleichzeitig in kürzester Zeit höchste Qualitätsstandards und minimale Kosten erreicht werden können. Das am Institut für Produktentwicklung (IPEK) erforschte und umgesetzte XiL-Framework bietet mit dem Verständnis begleitender Modellbildung und Modellierung erhebliches Potenzial zur weiteren Verbesserung etablierter Prozesse.
Systemische Wechselwirkungen und Validierung
Das Antriebssystem wird als komplexes, mit dem Gesamtfahrzeug wechselwirkendes Teilsystem verstanden, wobei auch den fahrzeugübergreifenden Wechselwirkungen im Hinblick auf Fahrer und Umwelt eine zentrale Bedeutung beizumessen ist. Der hohe Komplexitätsgrad des Systems Fahrzeug wird somit nochmals durch die komplexen, interagierenden Systeme Fahrer und Umwelt erhöht.
Die Validierung stellt die zentrale Aktivität der Produktentstehung dar und muss kontinuierlich erfolgen. Die Untersuchung der definierten Eigenschaften und Funktionen dient einem wichtigen Erkenntnisgewinn im Produktentstehungsprozess. Die Validierung auf virtueller (Simulation) sowie auf realer Ebene (Test) ist dabei zunehmend integriert und durchgängig zu betrachten. Insbesondere gilt es die in der Entwicklung über den Prozess, die Umgebungen (virtuell – Simulation; real – Prüfstand und Fahrversuch) und den Auftrag (Forschung, Vor-, Serienentwicklung und Applikation) zu berücksichtigen.
Es zeigt sich, dass konventionelle Validierungsumgebungen nicht mehr für alle Aspekte der modernen Antriebssystementwicklung ausreichend sind, um den zukünftigen Anforderungen gerecht zu werden, da für eine erfolgversprechende Entwicklung und Validierung zunehmend Funktionen berücksichtigt und überprüft werden müssen. Dies verdeutlicht sich an den Herausforderungen von NVH-Analyse und NVH-Design, übergreifenden Betriebsstrategien sowie Fahrdynamik unter Berücksichtigung der Wechselwirkungen zwischen Antriebssystem und Gesamtfahrzeug bei gleichzeitigem energieoptimierten und sicherheitsoptimierten Kundennutzen. Insbesondere im Wandel hin zu elektrifizierten Antriebssystemen ist davon auszugehen, dass für die derzeit teilweise unbekannten Wechselwirkungen die Erfahrungsbasis für zielorientiert interpretierbare Untersuchungen zu gering ist und geeignete Referenzprozesse fehlen.
X-in-the-Loop-Framework zur Validierung
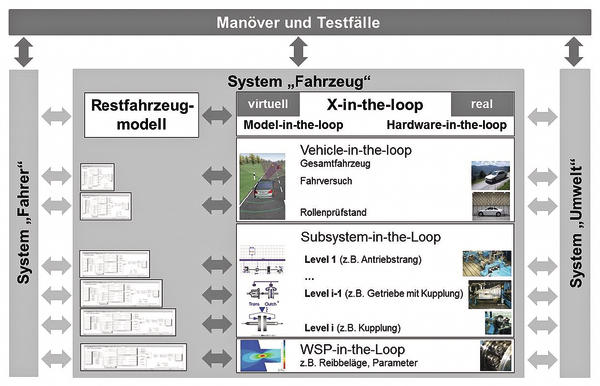
Der Grundstein für das im Weiteren beschriebe X-in-the-Loop-Framework (XiL) wurde am IPEK durch die Grundlagenarbeiten und die damit verknüpfte strategische Ausrichtung bereits Mitte der 90er-Jahre gelegt. Das XiL-Framework ermöglicht die Validierung auf unterschiedlichen Detaillierungslayern (XiL-Layern), vom Wirkflächenpaar (WSP-in-the-Loop) bis hin zum Gesamtfahrzeug (Vehicle-in-the-Loop) unter ständiger Einbeziehung der Systeme Fahrer und Umwelt.
Dabei wurde eine Validierungsumgebung geschaffen, die in einer durchgängigen Prozesskette die Erforschung grundlegender physikalischer Effekte, aber auch die Untersuchung, Validierung und Optimierung kompletter Antriebssysteme in der Praxis erlaubt. Im XiL-Framework steht das „X“ jeweils für den zu untersuchenden Prüfling, die sogenannte Unit-Under-Test (UUT), die eine einzelne Antriebsstrangkomponente, wie zum Beispiel ein Getriebe, ein Steuergeräte-Code oder ein komplettes Fahrzeug sein kann.
Auf jedem XiL-Layer wird das Restfahrzeug, mit dem Ziel, realitätsnahe Wechselwirkungen und Belastungen für die UUT zu gewährleisten, simuliert. Hierdurch können auch Funktionen abgebildet und validiert werden, die nicht allein durch oder in der UUT realisiert werden, wie beispielsweise eine energieeffiziente Betriebsstrategie. Der Detaillierungsgrad der Restfahrzeugsimulation hängt von der jeweiligen Zielsetzung der Aufgabenstellung ab und kann sich aus virtuellen und/oder realen Teilsystemen zusammensetzen. So kann zum Beispiel ein Sensor für die Umfelderkennung eines Fahrzeuges rein virtuell oder ein Verbrennungsmotor am Antriebsstrangprüfstand virtuell in Kombination mit einer realen hochdynamischen Elektromaschine abgebildet werden.
Bestechendes Merkmal ist, dass sowohl Open- als auch Closed-Loop-Manöver realisiert werden können. Das XiL-Framework ist am IPEK auf allen XiL-Layern in Hard- und Software verfügbar. Die Kompetenz für eine zielgerichtete Modellbildung und -implementierung bildet hierfür die Grundlage. Die Soft- und Hardware-Architektur bietet Schnittstellen zum Benutzer, zu anderer Soft- und Hardware sowie eine Modellbibliothek mit Fahrer-, Umwelt- und Restfahrzeugmodellen, die in den verschiedenen Ausprägungen eingesetzt werden können. Die XiL-Simulationsplattform, als zentraler Bestandteil des Frameworks, interagiert sowohl offline als auch online unter anderem mit verschiedenen Simulationsmodellen und Leistungsprüfständen.
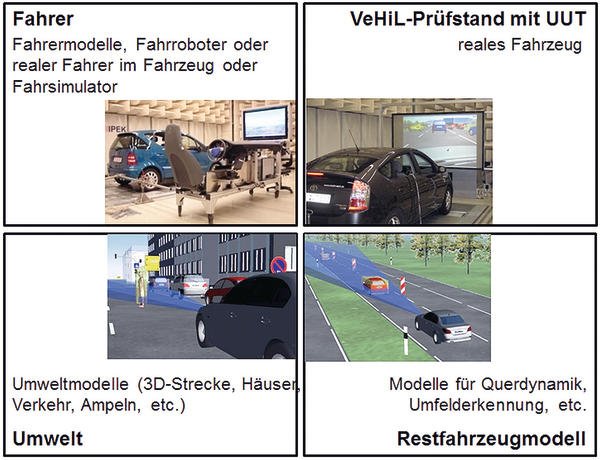
Der Fahrer ist eine wichtige Bewertungs- und Einflussgröße bei der Entwicklung von Fahrzeugkonzepten. Genauso wie bei dem Restfahrzeugmodell können unterschiedliche Ausprägungen auftreten und berücksichtigt wird dabei, dass bei NVH-Analysen der Fahrer zum einen Regel- (Manöverdurchführung) und zum anderen Messglied (Manöverbewertung) ist.
Die Umwelt kann in drei wesentlichen Ausprägungen auftreten: abstrakte Lastkollektive, reale Streckendaten, komplexe Umweltmodelle. Die aufgabenspezifische Umsetzungsstruktur des Validierungsframeworks wird maßgeblich von den Manövern oder Testfällen bestimmt. Reproduzierbarkeit, Übertragbarkeit oder Bewertung und Analyse sind dabei entscheidende Kriterien.
Einsatz eines Allradakustikrollenprüfstands
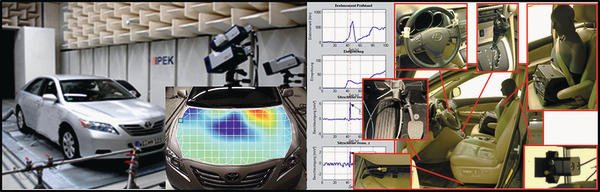
Auf dem Vehicle-in-the-Loop-Layer (VeHiL) ist der NVH-Fokus des IPEK auf die Innenraum- und Außenakustik sowie die simulierte Vorbeifahrtsmessung gesetzt. Des Weiteren werden Fragestellungen zur Bedienbarkeit und Methoden zur zeiteffizienten, automatisierten Untersuchung von Getriebe- und Gesamtfahrzeugeigenschaften untersucht.
Besondere Herausforderungen stellt die Phänomenbewertung beispielsweise durch objektive Kennwerte und die Bereitstellung eines geeigneten Fahrermodells dar. Derzeitiger Gegenstand der Forschung sind ebenso Validierungsmethoden, wie zum Beispiel die automatisierte Messung betriebszustandsabhängiger Schwingungsphänomene mit optionalem Trigger für die Messung mit einem PSV (3D Polytec Scanning Vibrometer). Die bereits erforschten und implementierten Methoden überzeugen durch eine hohe Reproduzierbarkeit insbesondere auch unter Berücksichtigung neuer und hybridisierter Antriebssysteme. Der eingesetzte Allradakustikrollenprüfstand des IPEK mit VeHiL-Technologie ist nach fünfjähriger permanenter Weiterentwicklung derzeit in dieser Form der einzige frei zugängliche seiner Art und versteht sich auch im internationalen Vergleich als Benchmark. Die jüngste Erweiterung um einen Fahrroboter stellt einen weiteren entscheidenden Beitrag zur Leistungsfähigkeit dar.
KIT IPEK; Telefon: 0721 6084-6470; E-Mail: matthias.behrendt@kit.edu
Teilen:






{kind=link}