

Für das autonome Fahren reicht die Positionsbestimmung mit den heutigen Satelliten-Ortungssystemen nicht aus. Hochgenaue digitale Kartenmodelle werden letztlich die Daten liefern, mit denen jedes autonome Fahrzeug seine aktuelle Position berechnet.
Der Autor: Hartmut Hammer, freier Mitarbeiter der AutomobilKonstruktion
Alltagstauglich ist die Positionsbestimmung der Fahrzeuge per GPS-System – allerdings bei Toleranzen von fünf bis zehn Metern nur für die Navigation. Wenn das europäische Galileo-System in Betrieb sein wird, lässt sich die Position eines Fahrzeugs bis auf etwa einen Meter genau bestimmen. Für autonomes Fahren ist aber eine Genauigkeit im Dezimeter-Bereich erforderlich. Technisch ist diese Präzisionsaufgabe lösbar – denn mit Kamera, Radar- und Lidarsensoren sind die Messgeräte ja bereits an Bord. Sie können den Abstand zu Bordsteinen, Häuserkanten, Leitplanken und anderen festen Objekten im Umfeld der Straßen präzise messen und dann – ja dann?
Virtuelle Straßen und Landschaften
An dieser Stelle kommt die hochauflösende Karte ins Spiel, die mit den Landkarten vergangener Tage nichts mehr gemein hat. Sie muss erstens ein hochgenaues digitales Abbild der Erdoberfläche (Straßen, Höhenprofile, Landmarken, Gebäude) bieten, an dessen Referenzpunkten sich autonom fahrende Fahrzeuge präzise verorten können. Des Weiteren müssen alle Verkehrszeichen enthalten sein, sowie dynamische und temporäre Informationen wie Baustellen, Umleitungen oder Unfallorte. Nicht zuletzt müssen die Karteninformationen in einer Datenbank stets topaktuell gepflegt werden und in Millisekunden per Mobilfunkverbindung in den Fahrzeugen verfügbar sein.
Dieses Anforderungsprofil erfüllen nur wenige Kartenanbieter, die drei wichtigsten sind wohl Tom Tom, Google und Here. Letzterer wurde 2015 von seiner Muttergesellschaft Nokia zum Verkauf angeboten – die Automobilhersteller Audi, BMW und Daimler haben Here im Sommer 2015 für einen Kaufpreis von etwa 2,5 Milliarden Euro zu gleichen Teilen unter ihre Fittiche genommen.
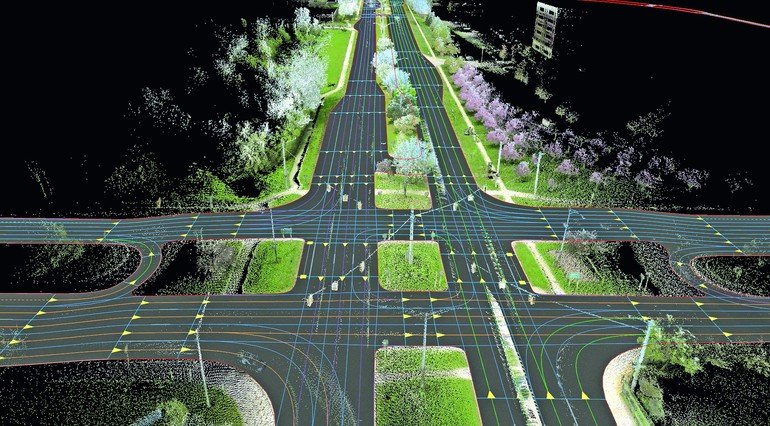
Aktuell baut Here seine HD Live Map für autonomes Fahren fleißig aus. Here-Fahrzeuge mit auf dem Dach montierten Lidarsensor erfassen sukzessive die Straßen-Infrastruktur und die Objekte neben der Straße. Deren Entfernungen und Maße werden miteinander in Beziehung gesetzt und als digitales Umgebungsmodell abgespeichert. Aus diesen Daten lässt sich beispielsweise der Kurvenradius herauslesen, die Anzahl der Fahrspuren, aber auch die Position von Schilderbrücken, Leitplanken und anderen Landmarken. Später kann ein diesen Abschnitt autonom befahrendes Fahrzeug durch kontinuierlichen Abgleich seiner Fahrzeug-Sensordaten mit den digitalen Umgebungsdaten der HD Live Map die Fahrzeugposition auf 10 bis 20 Zentimeter genau berechnen.
Jedem Automobil sein eigener Fahrstil
Über diese erste Kartenschicht wird ein weiterer Layer gelegt, der jede Art von dynamischen Informationen enthält, die außerhalb der Reichweite von Fahrzeugsensoren auftreten. Das sind zum Beispiel der Verkehrsfluss, dynamisch wechselnde Tempolimits, Baustellen, Unfälle, auf der Straße liegende Gegenstände, aber auch die Wetterverhältnisse und Ampelinformationen.
Als dritte Schicht der „digitalen Straßenkarte“ plant Here einen Algorithmus, der aus den Geschwindigkeitsprofilen der anderen Verkehrsteilnehmer ein kontextbezogenes Tempo individuell für jedes autonome Fahrzeug ermittelt. Beispielsweise ist abhängig von der Tages- oder Nachtzeit, den Wetterbedingungen, der Verkehrsdichte, dem Fahrzeugmodell und den Präferenzen der Insassen in einer Kurve für unterschiedliche Fahrzeuge jeweils eine andere Geschwindigkeit das komfortable Optimum. Für jeden Straßenabschnitt will man so personalisierte Geschwindigkeitsprofile entwickeln.
Wie aus Daten Bewegung wird
Dieses Dreischichten-Modell der HD Live Map ist jedoch nicht in Stein gemeißelt. Continental etwa kooperiert mit Here, baut aber sein hochgenaues Kartenmaterial in vier Schichten auf (Straßenverlauf und Topologie, Verkehrszeichen, Objekte neben der Fahrbahn, dynamische Verkehrsdaten). Bosch wiederum arbeitet mit Tom Tom an der Kartentechnik für autonomes Fahren und spricht sogar von fünf Schichten: zwei statischen (Navigationskarte, digitales Umfeldmodell) und drei dynamischen (ortsbezogen z.B. Tempolimits, regional z.B. Verkehrssituation, sowie Gefahrenmeldungen wie Falschfahrer).
Woran die Entwickler aber noch arbeiten müssen, ist die Dynamisierung der Umfeldmodelle. Denn die Abbildung des Jetzt-Zustands ist lediglich eine Voraussetzung für die Berechnung von Fahraktionen, die mehrere Sekunden in die Zukunft reichen. Ergänzend müssen die Absichten und Bewegungsprofile von anderen Verkehrsteilnehmern abgeschätzt werden. Über Wahrscheinlichkeitsrechnungen möglicher Handlungsoptionen der anderen Verkehrsteilnehmer soll die beste Lösung für die eigene Fahraktion gefunden werden. Diese zu erwartenden Bewegungsmuster der anderen Verkehrsteilnehmer wird der Rechner wie ein Fahranfänger lernen müssen – Stichwort Machine Learning.
Here Global B.V., Eindhoven/Niederlande, https://company.here.com
Teilen:






{kind=link}