


Die heutigen elektrischen und elektronischen (E/E-)Architekturen sind nicht für die hohen Bandbreiten und Redundanzanforderungen des automatisierten und autonomen Fahrens vorbereitet. Aptiv hat deshalb ein vorausschauendes Vernetzungskonzept entwickelt, mit dem in etwa fünf Jahren Fahrzeuge vollautomatisiert nach Level 4 und nach 2025 autonom nach Level 5 unterwegs sein könnten.
Bei automatisiert fahrenden Automobilen nach Level 4 wird sich das Datenaufkommen im Vergleich zu heutigen Level-2-Fahrzeugen verzehnfachen. Sukzessive verwandeln neue Sensoren, Fahrfunktionen sowie funktionale Anforderungen und Redundanzen die E/E-Architektur in ein immer komplexeres Gebilde. Sie wird schlichtweg zu schwer, zu groß und zu teuer. Heute wiegt allein der Leitungssatz eines Oberklasse-Fahrzeugs bis zu 50 kg (ohne Steuergeräte!) und besteht aus mehr als 4500 einzelnen Kabeln. Zwar kann eine Miniaturisierung der Kabel und Stecker die Masse und den Platzbedarf einer E/E-Architektur begrenzen. Doch diese Potenziale sind weitgehend ausgeschöpft. Möglich wäre auch eine unabhängige, zweite Energieversorgungs- und Signalverteilungsebene inklusive Sensorik und Prozessoren – aber zu schwer, platzintensiv und zu teuer.
Redundanz als oberstes Ziel
Als Ausweg aus diesem „Architecture Overload“ sieht Aptiv die Smart Vehicle Architecture (SVA). Sie soll bei einer vollständigen Umsetzung die Kostensteigerung im Vergleich zum heutigen Bordnetz auf etwa 30 % begrenzen. Die SVA basiert auf den Prinzipien Flexibilität (standardisierte modulare Komponenten, definierte Schnittstellen zwischen Hard- und Software) und Resilienz (Fail-Operational nach ASIL D und durchgehende Diagnosefähigkeit). Sicherheit wird etwa durch zwei separate, galvanisch getrennte Batterien und Stromkreise gewährleistet, Netzwerkstabilität durch eine Priorisierung von sicherheitsrelevanten Datenverkehren.
Die SVA ist so konzipiert, dass einzelne neue Komponenten schrittweise in bestehende E/E-Architekturen implementiert werden können. Ein erstes Beispiel dafür ist der von Audi definierte und von Aptiv entwickelte zentrale Fahrerassistenzrechner (zFAS) für den Audi A8. Solche Multi-Domänen-Rechner könnten künftig Gateway-Funktionen für den internen und externen Datenverkehr (Connectivity und Car2X) sowie das Management des Antriebs und des Infotainments übernehmen. Dank ihrer Leistungsfähigkeit würden diese Multi-Domänen-Rechner dann gegenseitig als Rückfallebene für sicherheitsrelevante Fahrfunktionen fungieren. Die technischen Voraussetzungen sind mit modernen Halbleitertechniken und Datenbussen mit extrem hoher Bandbreite vorhanden. Ethernet und HDBaseT mit bis zu 10 Gbit/s sind nur der Anfang, perspektivisch arbeitet Aptiv an Techniken mit Übertragungsraten von 20 bis zu 40Gbit/s.
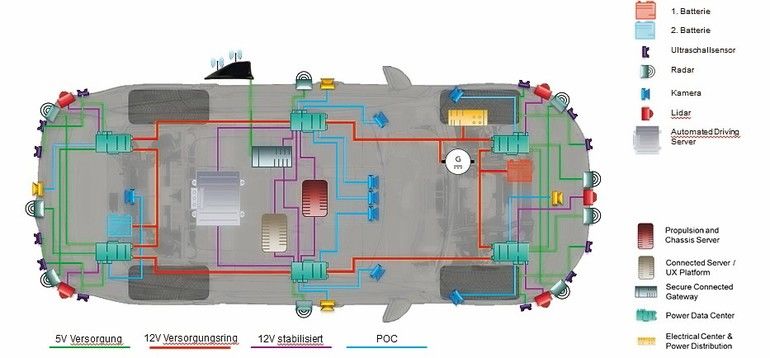
Als neue Idee entwickelt Aptiv sogenannte Power Data Center (PDC), zonal verteilte Steuergeräte, idealerweise in den vier Ecken des Fahrzeugs. Dort ist die Konzentration an Sensoren für autonomes Fahren sehr groß, ebenso wie der elektrische Leistungsbedarf der dort platzierten Aktuatoren. Die PDCs übernehmen die Leistungsverteilung in ihrer Zone, sammeln die Sensor-Rohdaten und geben sie an die Multi-Domänen-Rechner weiter, wo sie dann für automatisierte Fahrbefehle verarbeitet werden. Zusätzlich können die PDCs einfachere Steuerungsfunktionen –etwa für das Licht oder das Audiosystem übernehmen.
Der Datenverkehr zwischen Sensorik, PDCs und Multi-Domänen-Rechnern erfolgt mit einer Ringtopologie, damit bei Störungen die Leistungsversorgung oder der Datenverkehr über den anderen Zweig gewährleistet bleiben. Eine Kreuzschaltung für die wichtigsten Sensoren soll sicherstellen, dass selbst bei Ausfall eines PDC noch eine ausreichende Informationstiefe an jeder Fahrzeugpartie bereitsteht, damit das Fahrzeug kontrolliert einen sicheren Zustand erreichen kann. Dank der zonalen Aufteilung der SVA sind kleinere Kabelsätze möglich. Zusammen mit der weitgehenden Verwendung von Standardkomponenten wird so die automatisierte Fertigung wesentlich erleichtert. Als Resultat sieht Aptiv eine höhere Fertigungsqualität bei reduzierten Kosten. Nicht zuletzt wird die Rückverfolgbarkeit der Fertigungsprozesse und -parameter verbessert.
Die SVA ist auch Auslöser und Antwort für zwei Paradigmenwechsel. Erstens wäre laut Aptiv eine ganzheitliche Definition der E/E-Architektur schon zu Entwicklungsbeginn vorteilhafter als die bisherige Praxis, zuerst Subsysteme samt Elektronik und anschließend das Bordnetz zu definieren. Zweitens gewinnen bei der SVA leistungsfähige Domänenrechner aus den Rohdaten vielfältige Erkenntnisse, die der Fahrzeugführung, Datenbanken in der Cloud oder direkt benachbarten Fahrzeugen zu Gute kommen können. Bisher hingegen werden Sensordaten möglichst vor Ort ausgewertet, was zwar den Datenverkehr im Netzwerk begrenzt, aber leider auch die Informationstiefe. Erste SVA-fähige Komponenten fließen laut Aptiv bald in die Serie ein. Eine komplett neue SVA erscheint ab Mitte des nächsten Jahrzehnts realistisch, am ehesten bei autonomen Roboter-Taxis, bei denen die zunächst hohen Kosten am ehesten einzupreisen sind. Später dürfte die smarte Architektur für den flächendeckenden Einsatz in Privatfahrzeugen nach Level 4 in Frage kommen.
Direkt zu Videos über die Smart Vehicle Architecture…
http://hier.pro/b2nYI







{kind=link}